
사용자가 목적지 정보 post 요청을 보내면, 그 목적지 데이터를 좌표값으로 변환 후 drone(jetson nano)로 전송해준다.
이때 views.py 함수에서 공유변수를 통해 manage.py에서 사용할 수 있도록한다.
manage.py의 드론과 연결된 socket객체를 통해 목적지 데이터를 드론에게 전송한다.
사용자 post요청시 목적지 정보를 공유 변수 send_data_to_drone에 넣는다.
※ 이떄 send_data_to_drone 은 deque()자료구조이다.
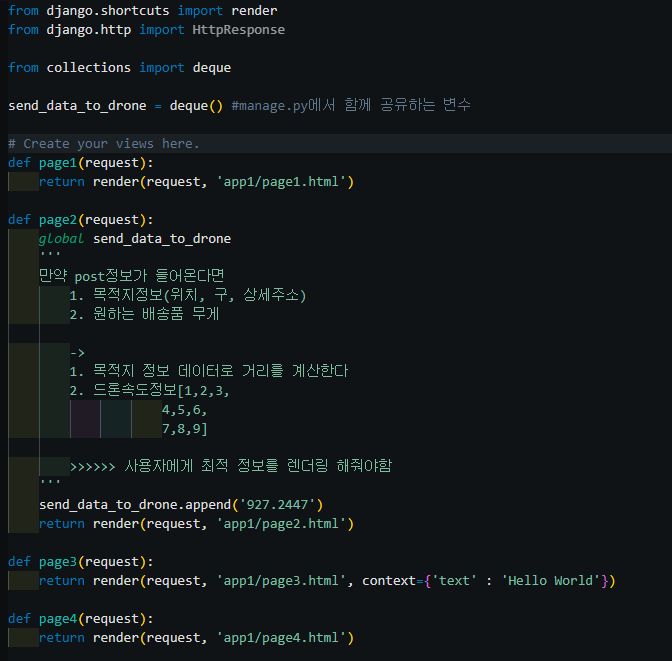
manage.py에서 views.py의 공유변수를 사용하기 위하여 import 해준다.

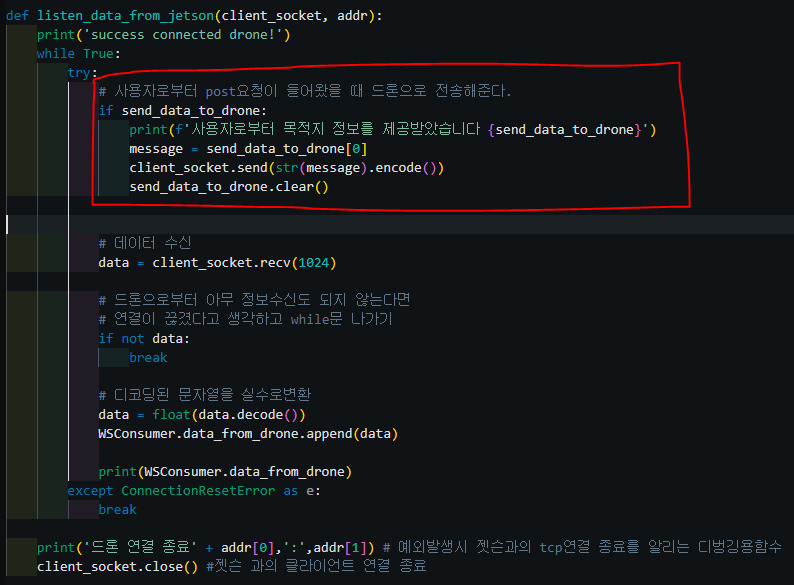
이전 포스팅에서 드론으로부터 실시간으로 수신대기하는 스레드 listen_data_from_jetson이다.
이 함수에 조건문을 이용하여 post요청으로부터 들어온 데이터가 있다면 드론으로 전송시켜준다.
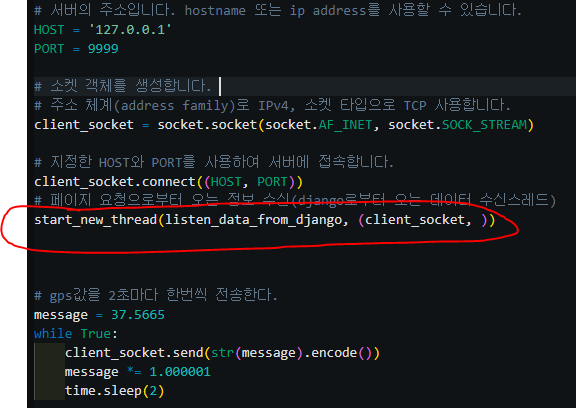
마지막으로 드론은 실시간으로 드론(jetson_nano) main함수 실행시 실시간으로 수신할 수 있는 스레드를 만들어준다.
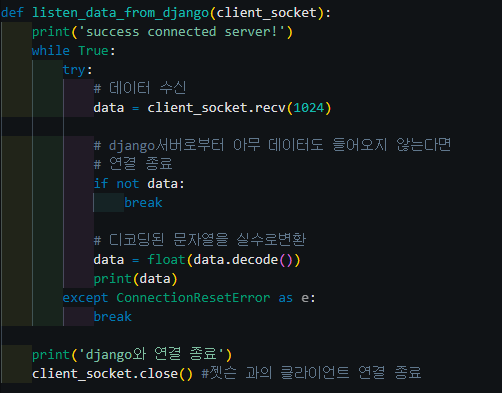
마지막으로 실제 jetson_nano의 main.py 스레드함수에서 django서버로부터 실시간 데이터를 받아와 출력하는 모습이다.
이 데이터 값으로 드론에서 목적지를 정해놓고 드론제어프로그래밍을 진행할 예정이다.
'프로젝트 > 한이음' 카테고리의 다른 글
| [한이음] 페이지 이동시 websocket 함수의 무한루프처리 (0) | 2022.10.02 |
|---|---|
| [한이음] 드론(JetsonNano)으로부터 실시간 데이터 수신 (0) | 2022.09.26 |
| [한이음] Django 서버 시작시 2개 프로세스 생성 (0) | 2022.09.26 |
| [한이음-콜드론] 프로젝트 디렉토리구조 (0) | 2022.07.10 |
| [한이음-콜드론] 개발 메뉴얼 (0) | 2022.06.04 |